Bio-Inspired Robots
Modeling and design of bio-inspired jumping, flapping, and walking robots.
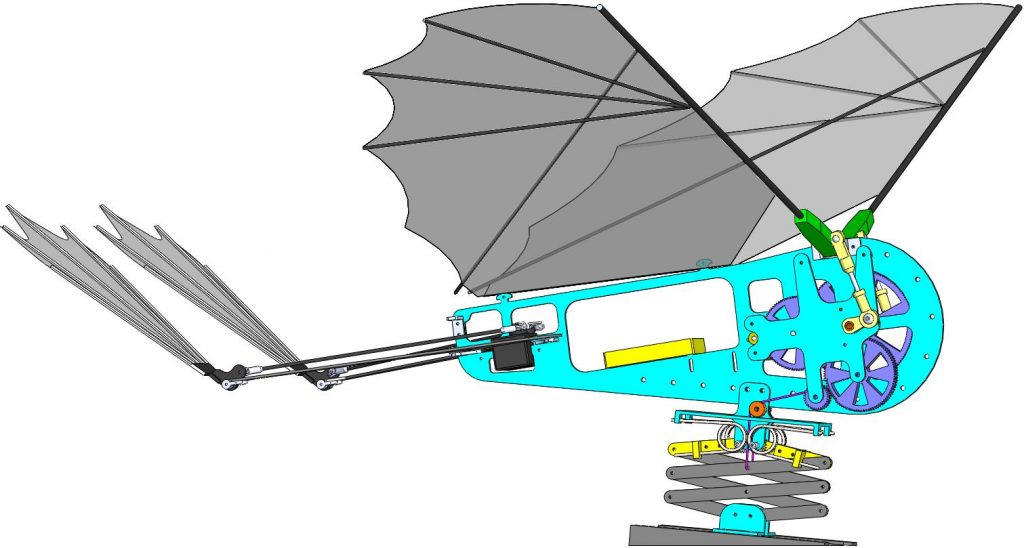
Flapping Wing Robots
(1) Takeoff
(2) Soft Landing
(3) Sensing and Control
Publications:
- Shuyan Yang, Yueling Shen, Boyang Li, Yuhui Li, and Jun Zhang, “Modeling and Simulation of a Flapping-Wing Robot with Active Tails for Balancing Control during Wheeled Running,” IEEE International Conference on Mechatronics and Automation (ICMA2018), Aug. 5-8, China, pp. 1806-1811. EI.
- Jun Zhang, Chengcheng Dong, and Aiguo Song, “Jumping Aided Takeoff: Conceptual Design of A Bio-Inspired Jumping-Flapping Multi-Modal Locomotion Robot,” (ROBIO2017), December 5-8, 2017, Macau SAR, China, pp. 2142- 2147.
- Jian Ge, Guangming Song, Jun Zhang, Weiguo Wang, Zhen Li, and Yali Wang, “Prototype design and performance test of an in-phase flapping wing robot”, (ISIE2013), Taipei, China. EI.
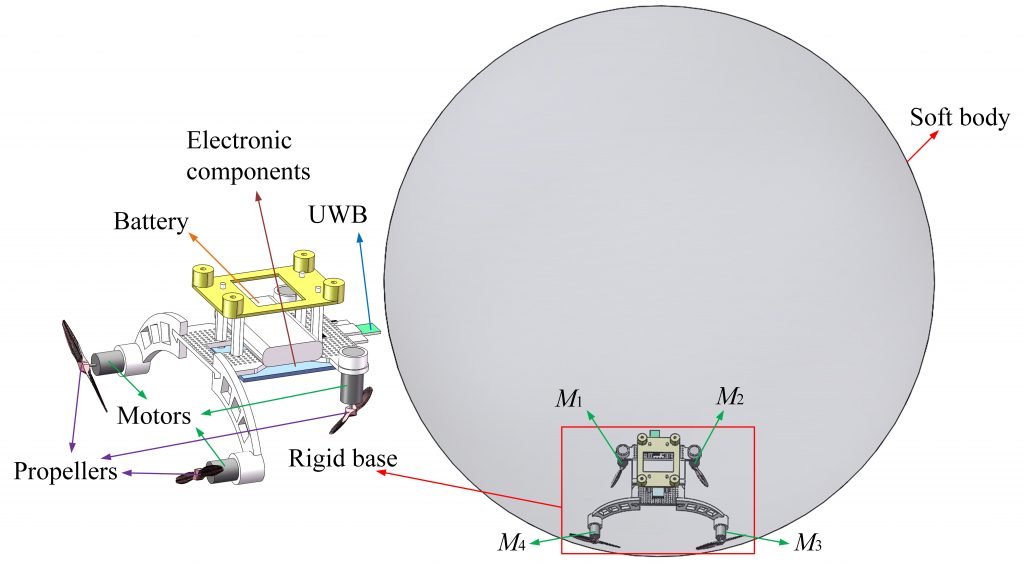
Robotic Blimp
(1) Modeling and Control


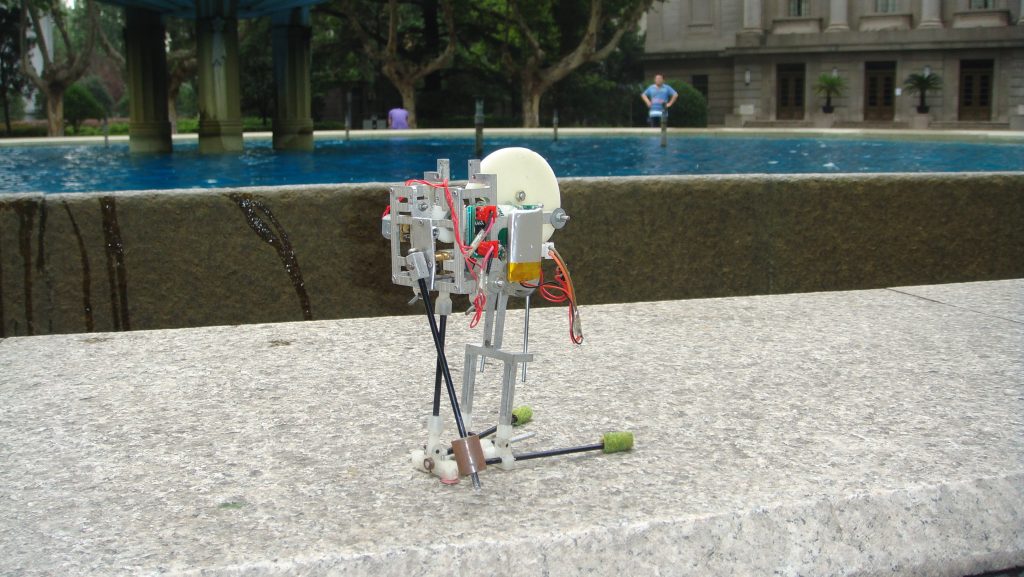
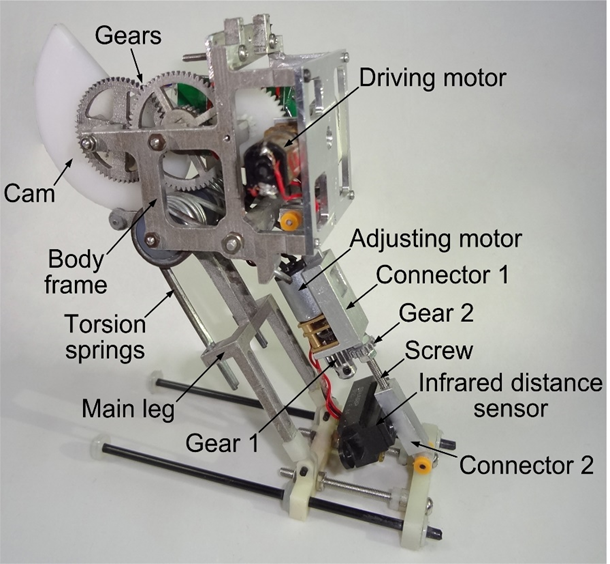
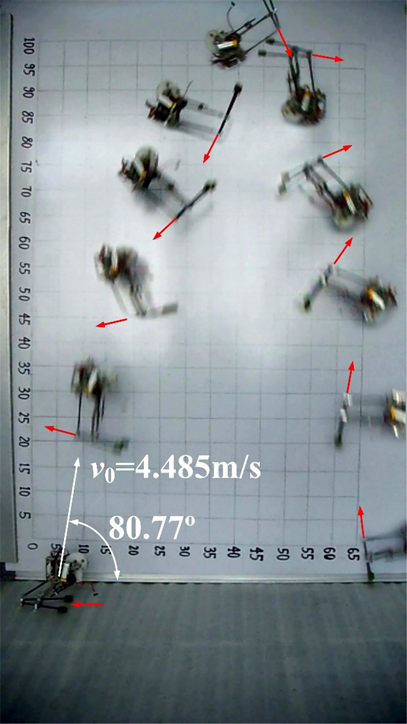
Jumping Robots
(1) Continuously Jumping
(2) Self-Righting
(3) Steering
(4) Deployment
(5) Recycling
-1024x768.jpg)
Publications:
- , Xi Yang, Guangming Song, Tianyuan Chen, and Yong Zhang, “Relative orientation and position detections based on an RGB-D sensor and dynamic cooperation strategies for jumping sensor nodes recycling,” Sensors, vol. 15, no. 9, pp. 23618-23639,Sep. 17, 2015, SCI. (IF=2.033)
- , Xi Yang, Guangming Song, Ying Zhang, Shumin Fei, and Aiguo Song, “Structural-Parameter-Based Jumping-Height-and-Distance Adjustment and Obstacle Sensing of a Bio-Inspired Jumping Robot,” International Journal of Advanced Robotic Systems, vol. 12, Jun. 5, 2015, SCI/EI. (IF=0.615)
- , Guangming Song, Yuya Li, Guifang Qiao, Aiguo Song, “A bio-inspired jumping robot: modeling, simulation, design, and experimental results”, Mechatronics, vol. 23, no. 8, pp. 1123-1140, Dec. 2013, SCI/EI. (IF=1.871)
- , Guifang Qiao, Guangming Song, and Aimin Wang, “Design and implementation of a remote control system for a bio-inspired jumping robot,” International Journal of Advanced Robotic Systems, vol.9, Oct. 10, 2012, SCI/EI. (IF=0.615)
- , Guangming Song, Guifang Qiao, Zhen Li, and Aimin Wang “A wireless sensor network system with a jumping node for unfriendly environments,” International Journal of Distributed Sensor Networks, Vol. 2012, Article ID 568240, pp. 1-8, May 2012, SCI/EI. (IF=0.906)
- , Guangming Song, Guifang Qiao, Tianhua Meng, and Hongtao Sun “An indoor security system with a jumping robot as the surveillance terminal,” IEEE Transactions on Consumer Electronics, Nov. 2011, vol.57, no. 4, pp. 1774-1781, SCI/EI. (IF=1.12)
- Jun Zhang, Guangming Song, Hongtao Sun, Ying Zhang, Guifang Qiao, Aiguo Song, “Locomotion Performance Analysis of a Foldable Wheeled Jumping Robot: FoldJumper,” Robot, vol. 36, no. 2, pp. 250-256, Mar. 2014. EI.
- Jun Zhang, Yunshuai Zhu, Guangming Song, Aiguo Song, “A networked jumping robot for emergency rescue,” Navigation and Control, vol. 9, no. 3, pp. 28-31, Aug. 2010.
- Hui Wang, Guangming Song, Jun Zhang, Tianhua Meng, “A Bio-Inspired Jumping Robot for Mobile Sensor Networks over Rough Terrain,” Lecture Notes in Electrical Engineering, pp. 57-62, 2012. EI.
- Yunshuai Zhu, Guifang Qiao, Jun Zhang, Hongtao Sun, Tianhua Meng, “Design of a foldable jumping robot for rough terrain,” Energy Procedia, vol. 11, 2011, pp. 1679-1683.
- Hongtao Sun, Guangming Song, Jun Zhang, Guifang Qiao, Zhiwen Li, Aiguo Song, “Design and implementation of a tumbling robot with jumping capability,” Robot, vol. 35, no. 6, pp. 672-677, Apr. 2013. EI.
- Xi Yang, Guangming Song, Tianyuan Chen, Jun Zhang, Aiguo Song, “Modeling and experimental study of discrete and continuous movements during posture adjustment of a jumping robot,” Robot, vol. 38, no. 2, pp. 160-168, Mar. 2016. EI.
- Jun Zhang, Guangming Song, Guifang Qiao, Zhen Li, Weiguo Wang, and Aiguo Song, “A Novel One-Motor Driven Robot that Jumps and Walks,” 22013), May. 6-10, Germany, pp. 13-19. EI. (机器人与自动化领域顶级Top1国际学术会议,投稿2265篇,录用873 篇,中国大陆录用13 篇)
- Jun Zhang, Guangming Song, Zhen Li, Guifang Qiao, Hongtao Sun, and Aiguo Song, “Self-Righting, Steering and Takeoff Angle Adjusting for a Jumping Robot,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2012), Oct. 7-12, Portugal, pp. 2089-2094. EI. (智能机器人系统领域Top1国际学术会议,投稿1801篇,录用806篇,中国大陆录用26篇)
- Jun Zhang, Xi Yang, Ying Zhang, Guifang Qiao, Guangming Song, Aiguo Song, “Aerial Posture Adjustment of a Bio-Inspired Jumping Robot for Safe Landing: Modeling and Simulation,” (ROBIO2014), Dec. 5-10, Indonesia, pp. 968-973. EI.
- Jun Zhang, Kai Ding, Ying Zhang, Xi Yang, and Guangming Song, “Modeling and Simulation of a Bio-Inspired Symmetrical Jumping Robot,” (ICMA2014), Aug. 3-6, China, pp. 1353-1358. EI.
- Hongtao Sun, Guangming Song, Jun Zhang, et al., “Design of a tumbling robot that jumps and tumbles for rough terrain,” (ISIE2013), Taipei, China. EI.
- Jun Zhang, Yunshuai Zhu, Hui Wang, Jimei Zhang, “Design of a bio-inspired jumping robot for rough terrain,” (ESIAT 2010), Wu Han, China 2010, pp. 40-43. EI.
Exploration Robot
Bio-inspired locomotion mechanism and control of rovers for unstructured environment exploration.
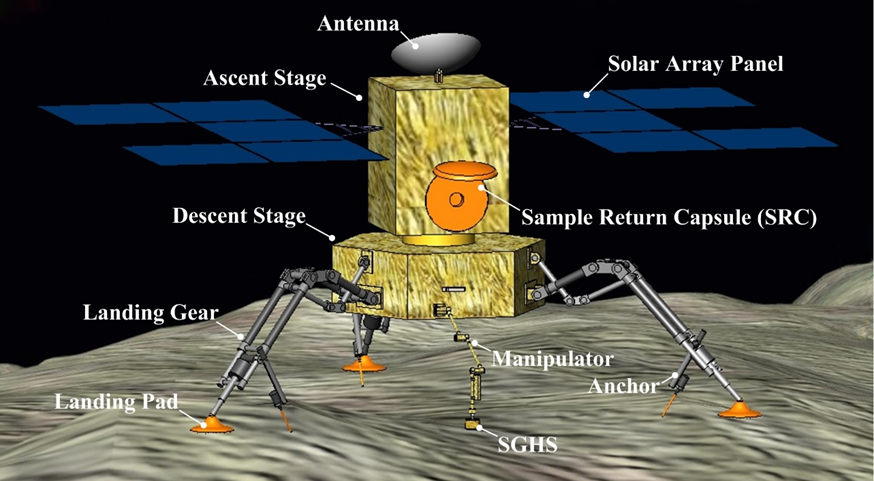
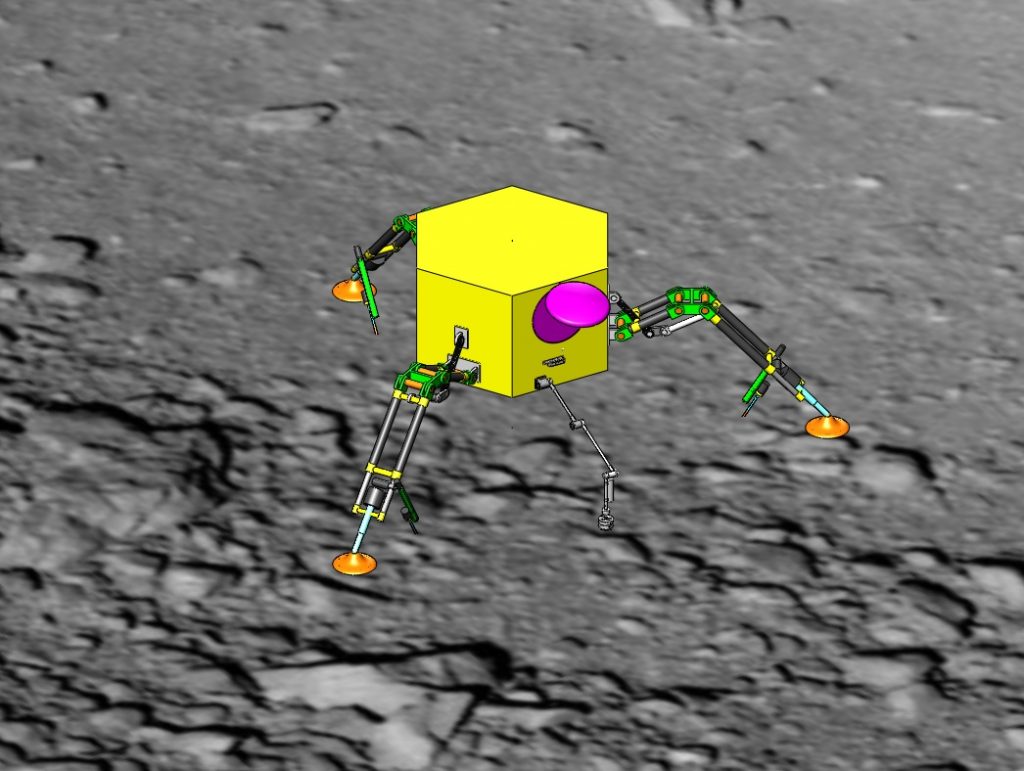
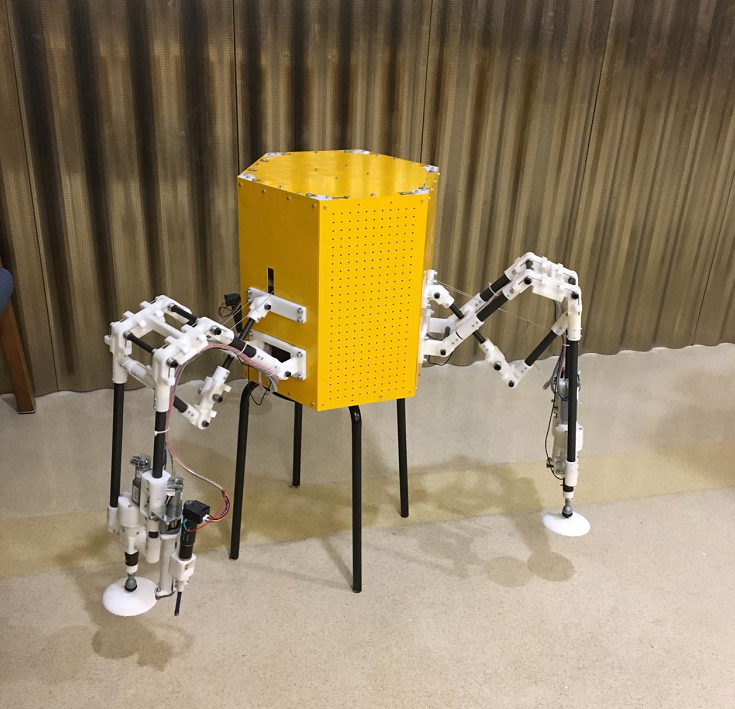
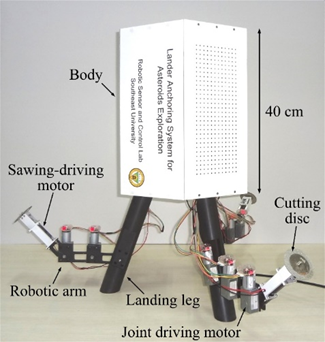
Asteroid Exploration Robot
Soft landing, anchoring, sampling, and locomotion of asteroid rovers.
(1) Soft landing
(2) Anchoring
(3) Moving
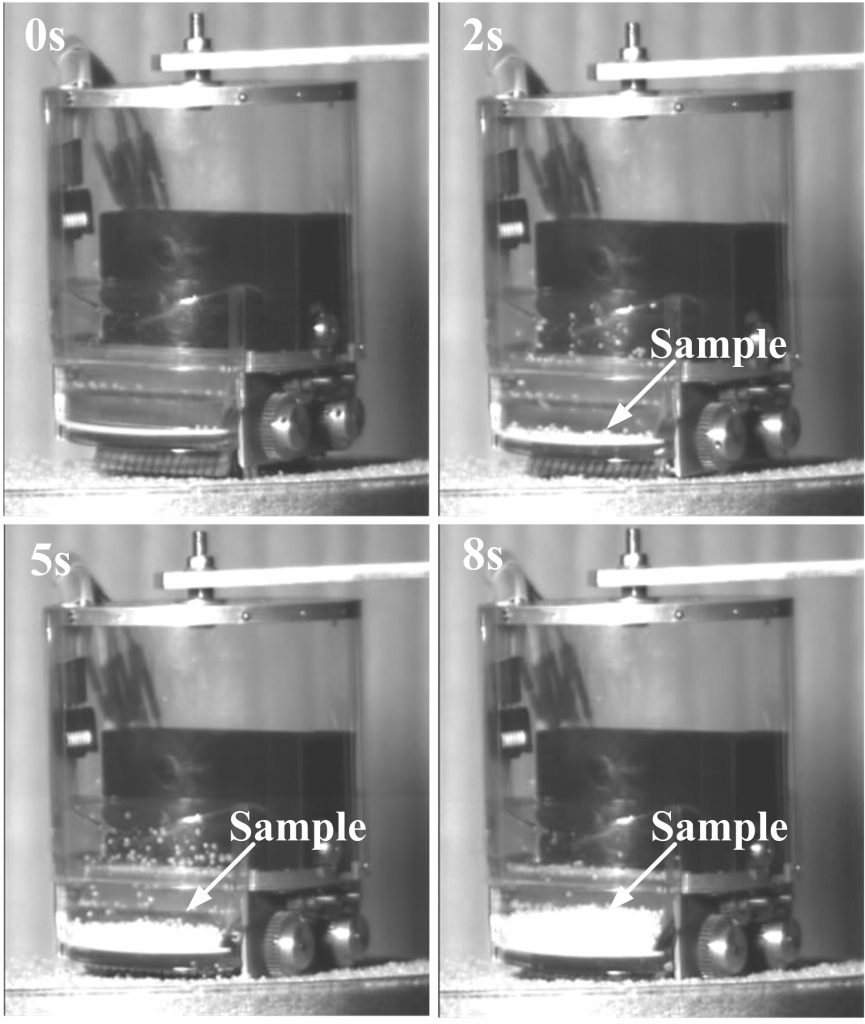
(4) Sampling
Publications:
- Jun Zhang, Yizhuang Ding, Liuchen Chen, Aiguo Song, Fan Huang, and Xi Lu, “A sweeping and grinding combined hybrid sampler for asteroid sample return mission,” Acta Astronautica, vol. 198, Sep. 2022, pp. 329-346.
- Jun Zhang, Chengcheng Dong, Hui Zhang, Song Li, Aiguo Song, “Modeling and experimental validation of cutting based lander anchoring and sampling methods for asteroid exploration,” Advances in Space Research, vol. 61, no. 9, pp. 2426–2443, May 2018. SCI. (IF= 1.401)
- Jun Zhang, Chengcheng Dong, and Aiguo Song, “Force Modeling of the Cutting Disc in Rock Sawing for Anchoring and Sampling in Asteroid Exploration,” (ROBIO2017) IEEE International Conference on Robotics and Biomimetics,December 5-8, 2017, Macau SAR, China, pp. 32-37.
- Jun Zhang, Aiguo Song, and Wei Lu, “Anchoring and Sampling Processes Analysis of a Landing Robot in Asteroid Exploration,” (ROBIO2016), Qingdao, China, December 3-7, 2016, pp. 158-190.
- Jun Zhang, Aiguo Song, Xiaonong Xu, Wei Lu, “A rigid and flexible structures combined deployable boom for space exploration,” (IROS2016). Daejeon, Korea, October 9-14, 2016, pp. 2920-2926.
- Jun Zhang, Baodong Fang, Xi Lu, Aiguo Song, Song Li, Bilei Zhou, Liang Xu, “Surface Anchoring Methods Studying of Asteroids Lander,” Manned Spaceflight, vol. 21, no. 3, pp. 270-277, May 2015.
Multi-Legged Robot
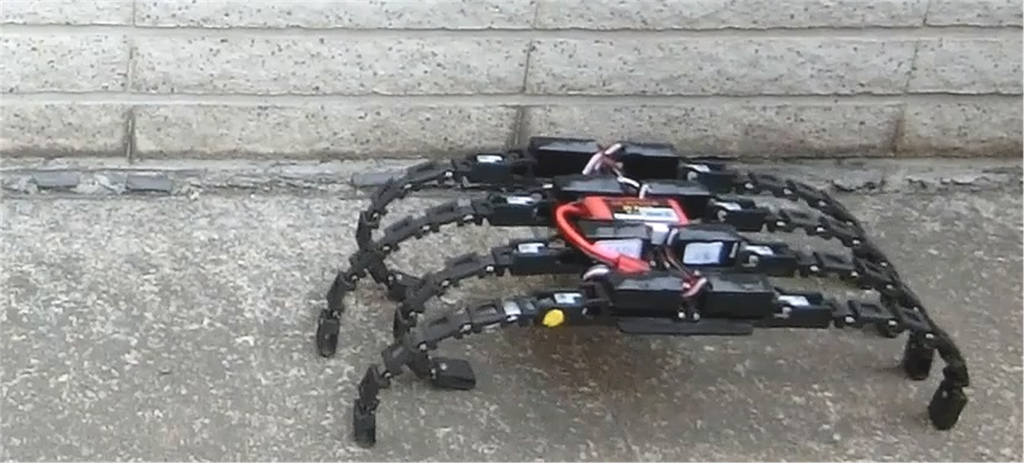
- Jun Zhang, Qi Liu, Jingsong Zhou and Aiguo Song, “Crab-inspired compliant leg design method for adaptive locomotion of a multi-legged robot,” Bioinspiration & Biomimetics, 24 Jan. 2022, 025001.
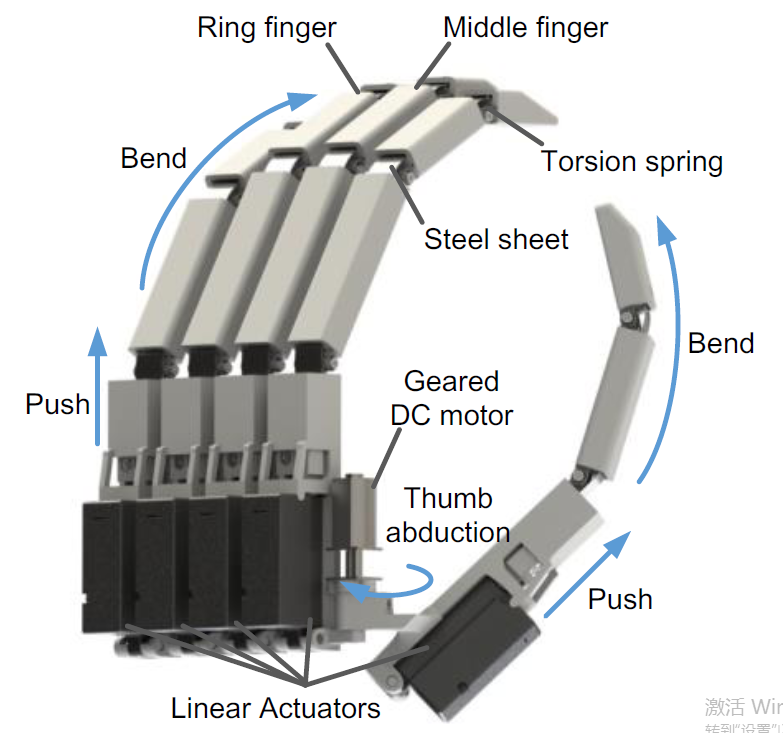
Rehabilitation Robot
Bio-inspired modeling and control of wearable robots for health monitoring and rehabilitation.
(1) Body Posture Correction
(2) Rehabilitation Assist
(3) Bio-inspired modeling
(4) Mechanism design
(5) Sensing and control
video: https://ieeexplore.ieee.org/document/9863410/media#media
Publications:
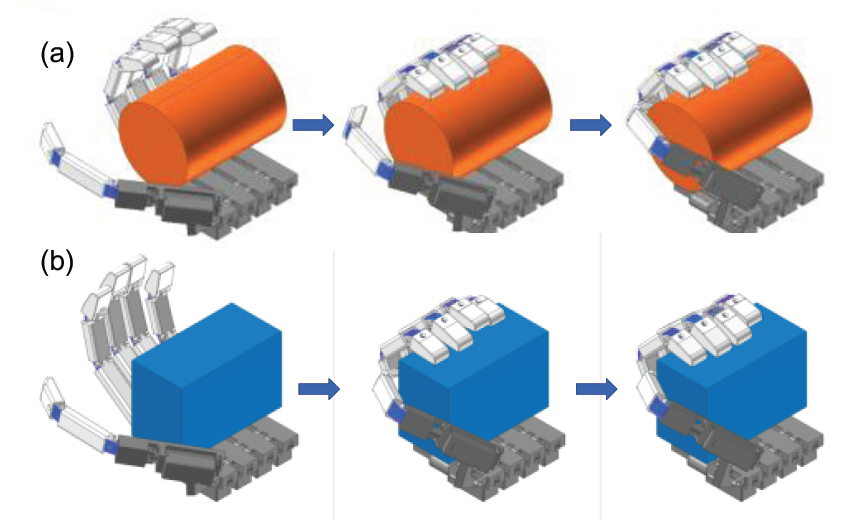
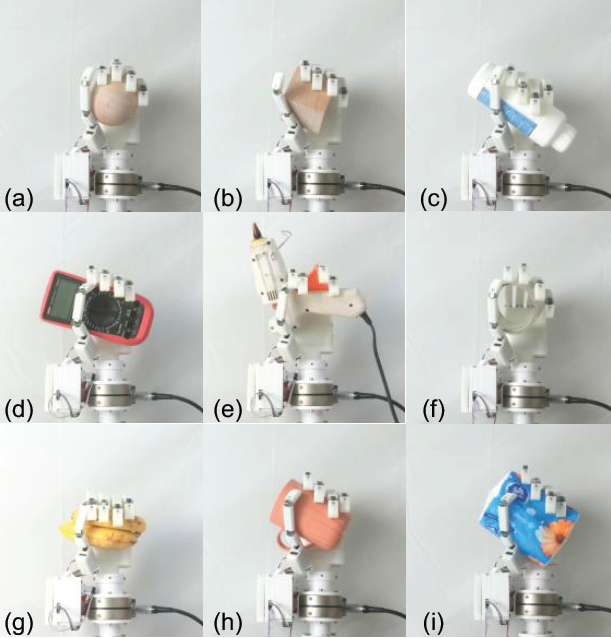
- Qi Liu, Jun Zhang, Xinyi Li, Jingsong Zhou, Xuhui Hu, Weiming Jin, and Aiguo Song, “A Rigid and Flexible Structures Coupled Underactuated Hand,” in: IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 11-15 Jul., 2022, pp. 1587-1592.
- Jun Zhang, Hui Zhang, Chengcheng Dong, and Aiguo Song, “Architecture and Design of a Wearable Robotic System for Body Posture Monitoring, Correction, and Rehabilitation Assist,” International Journal of Social Robotics, Accepted.
- Dejing Ni, Lu Wang, Yu Ding, Jun Zhang, Aiguo Song, and Juan Wu “The design and implementation of a walking assistant system with vibrotactile indication and voice prompt for the visually impaired,” (ROBIO2013), China, EI.
(7) Stroke Early Recognition
Intelligent Service Robot
Human inspired service robot with natural multi-channel information sensing and interaction capabilities.
(1) Bio-inspired human like mechanism
(2) Multi-channel sensing
(3) Human-machine interaction
(4) Safe control for locomotion and operation
Antarctic Plateau exploration
(1) Surveillance
(2) Teleoperation Control